Pedro F. Proença
Assistant Professor
Universidade Nova de Lisboa FCT
About me
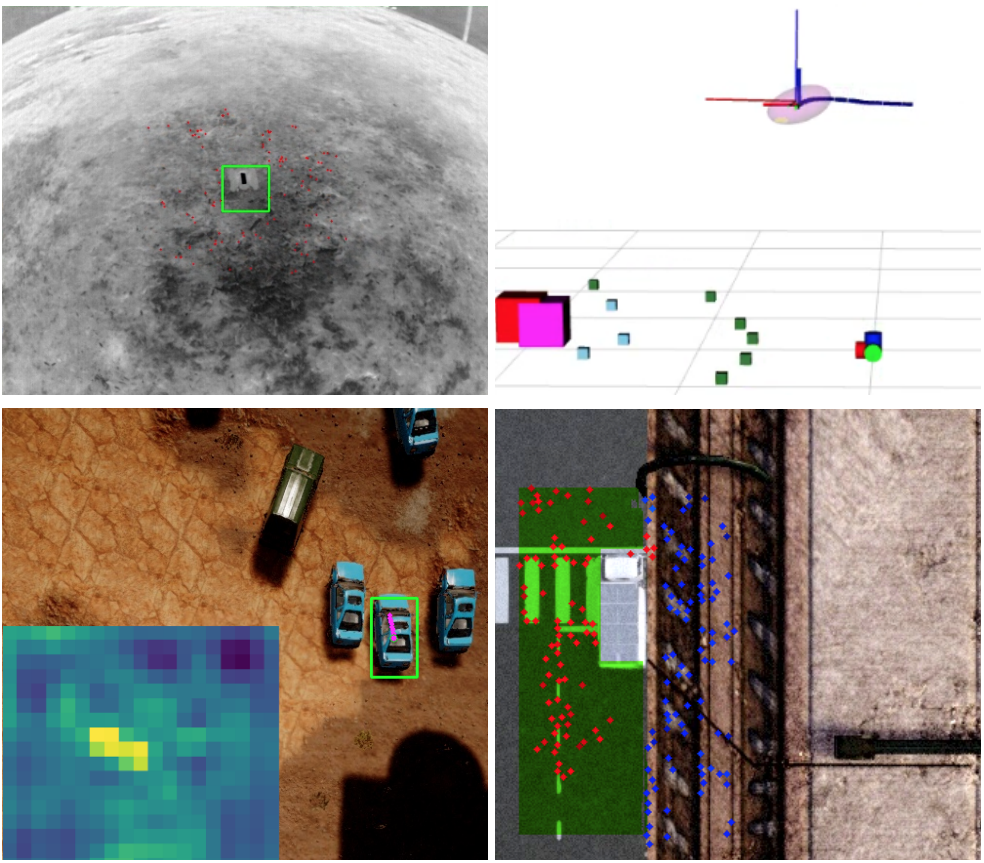
Pedro Proença (English pronunciation: Peh-dru Pru-ensuh) is a roboticist, computer vision researcher. He was previously an engineer at NASA-JPL, where he developed perception and state estimation software for Moon rovers and future Mars Helicopter. Most notably, he lead the development of the traversability mapping module for the CADRE Flight mission and its testing from simulation to autonomous driving on flight modules. He then worked in a few tech startups before joining NOVA-FCT.
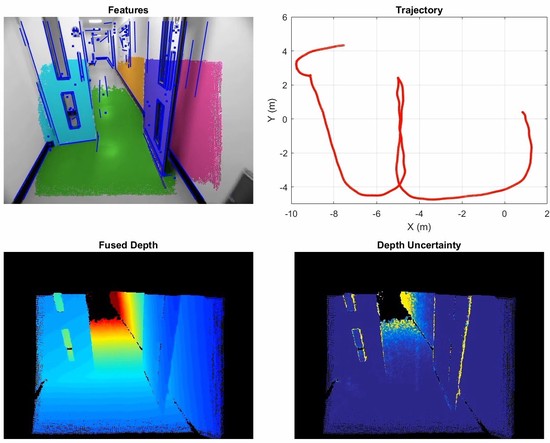
His PhD was on Probabilistic Visual Odometry using RGB-D and Geometric primitives. Most of his research is in modelling uncertainty and using multiple view geometry, deep learning and computer graphics to solve robotics and computer vision problems. However, He is generally interested in all aspects of robot autonomy.
News
- 2025-12-01 Joined NOVA-FCT as an Assistant Professor specialized in AI
- 2025-07-01 Joined Tekever UAS 🦄 Computer Vision group
- 2025-10-23 New paper accepted to Field Robotics on Mars Ingenuity Autonomy
- 2024-03-02 New paper on our CADRE multi-agent autonomy software ready for the 🌙
- 2023-01-01 JPL Team Award for CADRE GNC Team
- 2022-05-23 ICRA 2022 Outstanding Deployed Systems Paper Finalist
Education
-
PhD in Computer Vision, 2018
University of Surrey
-
MSc in Telecommunications and Computer Science, 2013
ISCTE - Instituto Universitário de Lisboa
-
BSc in Telecommunications and Computer Science, 2011
ISCTE - Instituto Universitário de Lisboa